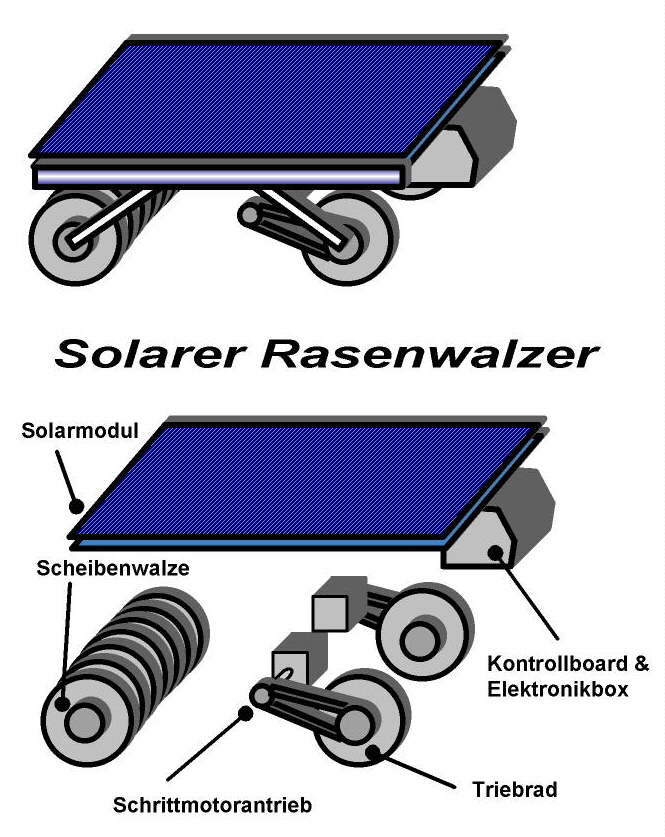
Solarer Rasenwalzer statt Rasenmäher!
....Das elektronische Deichschaf......
Es ist eine wahre Seuche: Sobald der Frühling die ersten warmen Tage beschert, rattern die üblichen Schneckenschredder in Form des geliebten Rasenmähers allerorts wieder los. Der heutige Zeitgenosse lebt dabei oft in dem Irrglauben, daß gesundes Graswachstum eliminiert gehört und daß dazu das übliche motorisierte Rotationsmesser zum Kahlschlageinsatz geschoben werden muß. Gar mancher mähgeplagte Zeitgenosse ist die kurze Lebensdauer und Wartungsintensität von Rasenmähern leid und versucht oft der Natursklaverei durch Verlagerung des Wohnortes in ein gartenfreies Umfeld zu entkommen.
Das muß nicht sein!
Verbreitet ist die Ansicht, daß Graswachstum mit dem Schermesser gestoppt werden muß oder gar durch massiven Chemikalieneinsatz. Dabei sind durchaus andere Verfahren denkbar. Ein Ansatz ist die Beobachtung, daß ein in Nutzung befindlicher (begangener) Rasen kaum hohes Graswachstum zuläßt. Grund dafür dürfte sein, daß hochwachsende Gräser einen empfindlichen Stengel besitzen, der bei Knicken die Versorgung der Pflanze mit Nährstoffen unterbricht u.a. auch weil solches flachliegendes Gras weniger Sonnenlicht zur Photosynthese zum Wachstum aufnehmen kann. Ein genutzter Rasen läßt deshalb bevorzugt kleinwüchsige Grassorten mit elastischen Halmen sich entwickeln.
Was liegt also nicht näher, als für
eine "ständige Nutzung" des Rasens zu sorgen, zB. indem eine
Rollwalze ständig die Oberfläche befährt und einmal am Tag die
"Halme flachlegt"?!
|
Mit einem Solarmodul läßt sich eine solche selbstfahrende Rasenwalze ständig mit Antriebsenergie versorgen. Die Walze selbst wird am besten als Rad-Stapel ,-also einzelnen "Rollsegmenten",-gebaut, damit Kurven gefahren werden können, weil so eine Art "Differenzialwirkung" erzielt wird. Als Antriebsmotoren eignen sich Schrittmotoren. Bei paariger Anordnung mit jeweils eigenem Triebrad haben sie den Vorteil, daß keine weitere aktive Lenkmechanik nötig ist, weil dem einzelnen Rad individuelle Drehwinkel (Anzahl an "Steps") zugeteilt werden können, sodaß Kurvenfahrt aktiv ermöglicht wird. Die Antriebsachsen müssen dann natürlich auch wenigstens etwas passiv schwenkbar sein. Kleinste Schwenkwinkel von nur wenigen Grad reichen aus, wenn ein solcher "Rasenwalzer" Streifen abfährt und bei jedem Vor- und Zurückfahren den Fahrstreifen etwas verlagert. Speziell rechtwinklige Flächen können so prima "bearbeitet" werden.
Wahrscheinlich ist geringe Geschwindigkeit ("Schneckentempo") für ein solches Vehikel sogar ein Vorteil, weil die Grasnabe so besser und wirksamer komprimiert werden kann. Bodenlebewesen haben so die Chance, zu fliehen oder sich in ungefährdete Wurzelbereiche zu verkrümeln. Das Gras selbst wird weniger beschädigt und bleibt gesünder, weil die Halme nicht mehr zerfasert werden. Womöglich haben Moose u.ä. so weniger Chancen.
Als Selbstfahrer braucht natürlich ein solches Vehikel eine Steuerung. GPS muß es nicht unbedingt sein, weil einfache Lösungen denkbar sind: Man setzt diesen Rasenwalzer einfach im Frühjahr auf die Wiese und sagt ihm per Taster einfach, wieviele Meter er Voraus und wieviele Meter er seitlich bestreichen soll. Ein Mikroprozessor kann dann leicht die erforderlichen Steps für die Schrittmotoren berechnen. Wege und rechteckige Flächen lassen sich so leicht darstellen. Für komplexe Flächen ist eine Software denkbar, die gescannte Flurkarten am PC erfasst und die Mähflächen per USB-Kabel an den Prozessor im Rasenwalzer überspielt.
Warum sollten zwangsläufige Ränder mit hohem Graswuchs außerhalb des Walzbereiches eigentlich ästhetisch nicht zugelassen werden? Für ein Picknick im Garten oder als "Weg" ist oft ein Bereich mit "limitiertem" Graswuchs zweckmäßig, warum sollten außerhalb dieser Bereiche nicht "Wildgräser" frei wachsen dürfen?! Und: Wer den Garten beklopterweise absolut naturfrei haben möchte, kann doch einfach überall Kunstrasen auslegen, das ist doch einfacher!
Im professionellen Sektor würde ein solcher Rasenwalzer-Roboter erhebliche Vorteile bieten: Seine Fahrgeschwindigkeit wäre so gering, daß ein permanenter automatischer Betrieb verantwortet werden kann, weil keine gefährlichen Anlagenteile da sind. Einfach im Frühjahr "abgesetzt" und programmiert könnte er sich bis zum Herbst autark der automatischen Grashöhenminimierung widmen .
Solarer Direktbetrieb ohne Akkus hat dabei den Vorteil extremer Langlebigkeit und Wartungsfreiheit, zumal solarer Energieeintrag direkt mit dem Graswachstum zeitlich zusammenfällt .
Im gewissen Sinne hat daher ein solcher Rasenroboter die Vorteile eines "elektronischen Deichschafes", dessen Trittwirkung vor allem übrigens die segensbringende Graspflege beschert!
Dem wirklichen Solar-Insider dürfte klar sein oder werden, daß die große Latenz des solaren Energieeintrags ganz andere Maschinenarchitekturen als wie bei den fossilenergetischen Konstruktionen nach sich zieht. So sind etwa "kriechende" Kehrroboter denkbar, die statt kurzlebiger Bürste etwa mit Preßluft- oder Vakuumstößen arbeiten. Solarbetriebene Roboter arbeiten langsamer, aber dafür auch viel zäh kontinuierlicher.
Internetveröffentlichung: Reiner Trimborn 6.8.2002
________________________
Kontakt /Email: mailto:reiner-trimborn@freenet.de